Fpv wifi камера как подключить
Ежедневные новости, видео и приколы.
YouTube канал


Подбор двигателя
Меню сайта
Магазин
TOP статьи
Оборудование
Плосколеты
Создание авиамоделей
- Фотоинструкции
- Видеоинструкции
- Обзоры изготовления
RC Магазины







Home />FPV аппаратура />Обзор FPV камеры MJX C4008 на WiFi
- Складной пропеллер из обломышей своими руками
- Балансир из карандашей
- Фестиваль Большие Гуси 2022
- Минипатрон для сверления
- Обзор Cessna E10
- Современные пульты радиоуправления в 2022 году
- Замена подшипников мотора 2205 1400
- Самодельные LiIon на авиамоделях и дронах
- Как сделать Mini Flash
- Сокол (Falcon) 1000 — 2-х моторное пилотажное FPV крыло.








| Обзор FPV камеры MJX C4008 на WiFi |
| Обзоры — FPV Аппаратура | ||||||||||||||||||
| Автор: Administrator | ||||||||||||||||||
|
Камера MJX C4008 это старший брат недавно рассматривающейся модели MJX C4005.
Так же как и ее младший брат, C4008 работает на WiFi диапазоне и использует вместо экрана смартфон или планшет под управлением Andoid или iOs. Давайте посмотрим, что из себя представляет это FPV камера. Как всегда начнем с видео распаковки и обзора . На видео можно увидеть как подключить камеру MJX C4008 к сотовому телефону, настроить WiFi и оценить задержку при передаче видео. В отличии от младшего собрата эта FPV WiFi камера имеет штатный переходник для питания от 2S аккумулятора и предназначена для установки на квадрокоптеры X серии (MJX X101 / X102 / X103 / X104 / X600 / A1 / A2 / A3 / A4).
Фактически MJX C4008 можно устанавливать на любой квадрокоптер, где ходовой аккумулятор 2S или можно закрепить дополнительный акк для этой камеры. Комплектация поставки полностью самодостаточна — есть все необходимое для закрепления WiFi FPV камеры, включая держатель для антенны.
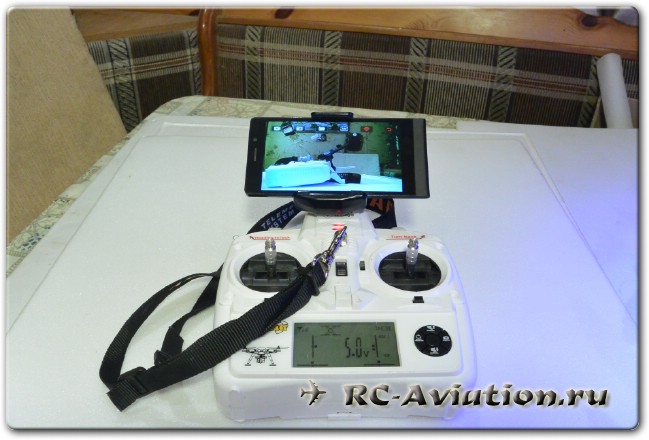
Держак для сотового крепится на выход антенны пульта управления, на видео я показывал, что он растягивается в весьма больших пределах и может удерживать и планшет.
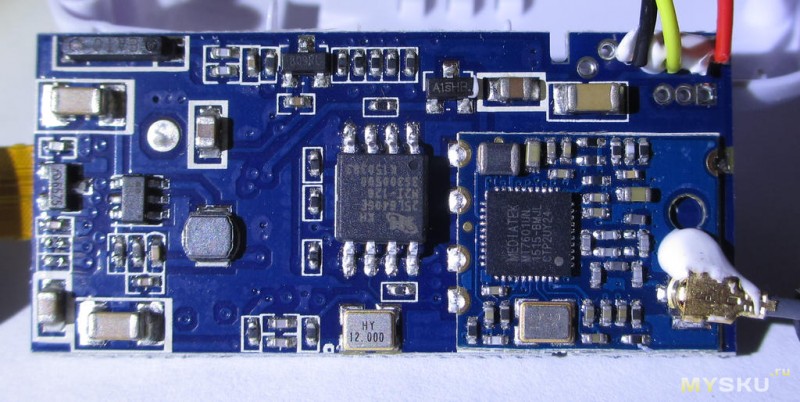
На фото видно, крепеж зафиксирован на пульт управления квадркопnером Seeker V303, затягивается с помощью 2-х винтов и держится крепко. Сама камера имеет размеры 57х47х30 мм.
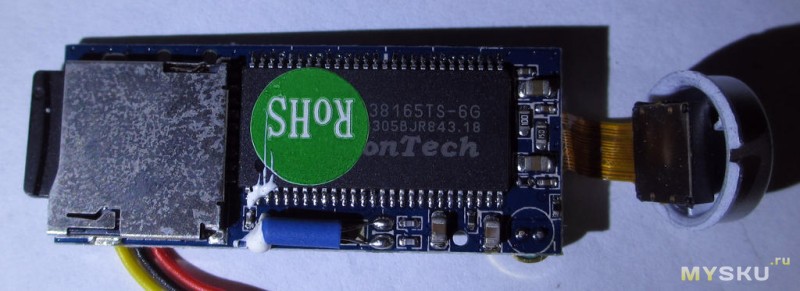
Карта памяти вставляется в камеру и запись ведется «на борт», теперь нет лагов при включении видео, так как канал не забивается. Фотографирует 1280х720, запись видео 720p (те же 1280х720) 20 кадров в секунду.
При попадании солнца в кадр — нет резкого затенения всей картинки.
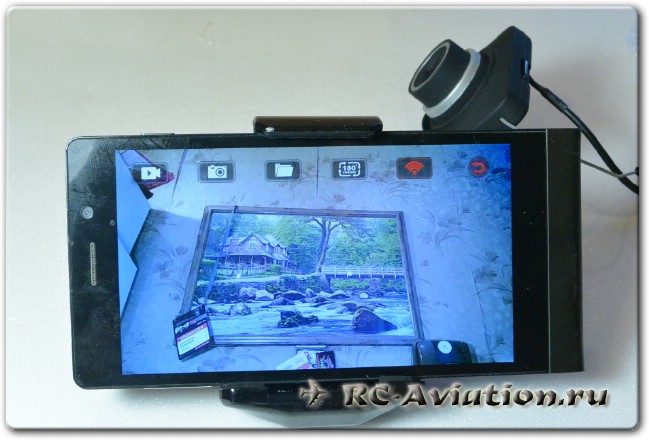
Машина снималась «на ходу», ее скорость примерно 25-30 км/ч. Так же стоит учитывать и то, что вывод производится на экран смартфона, так что все видно очень хорошо и размытия нет. В качестве монитора можно использовать любой смартфон, драйвера для него выложены тут .
ПО достаточно простое, возможно только включать запись видео и фото, переворачивать экран на 180 градусов, просматривать записанное.
Я закрепил камеру MJX C4008 к квадрокоптеру V303 с помощью 2-х стороннего скотча и на всякий случай притянул резинками.
Аккумулятор для ее питания так же закреплен на дне квадрокоптера с помощью 2-х стороннего скотча.
Антенну зафиксировал на ноге квадрокоптера резинкой. Подключаем питание, цепляемся к WiFi, запускаем софт от MJX и можно идти на полеты.
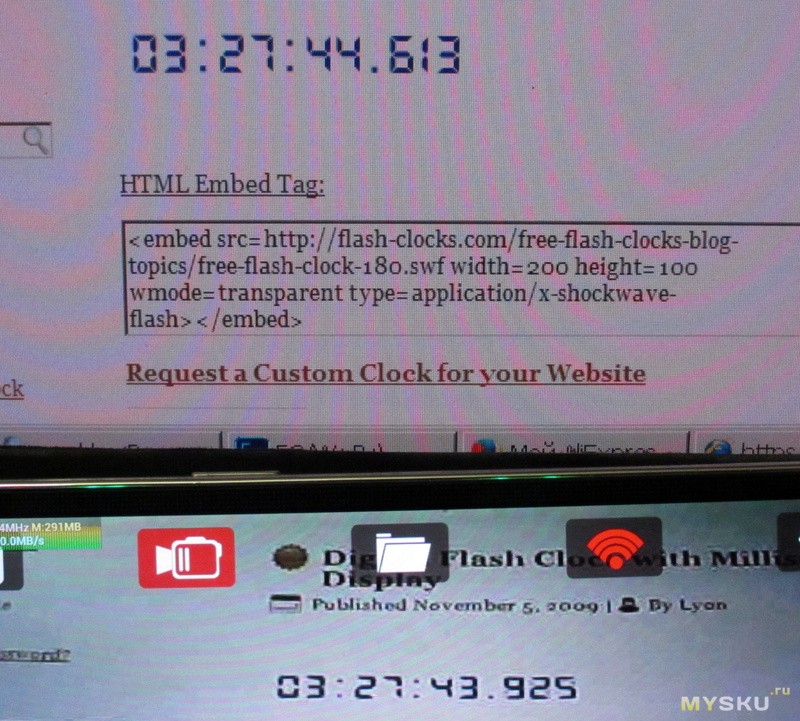
Полетные тесты показали возможность FPV полета с MJX C4008 примерно на 25 метров (длина плавательной дорожки в бассейне), на этом расстоянии камера «забивает» сигнал от пульта управления, можно, конечно, поставить бустер или сделать направляющий экран увеличивающий дальность полета , можно поставить на радиоуправляемую модель FM передатчик на 35 или 40 мегагерц или LRS на 450, тогда можно будет отлететь метров на 40, именно на таком расстоянии начинает очень сильно подтормаживать видео передающиеся на смартфон. Чтож, для WiFi — расстояние вполне приличное, «младший брат» не давал отлететь дальше 15 метров (забивал управление, картинка терялась на 20). Вот небольшая видео нарезка полетов MJX C4008 на квадрокоптере. Плюсы и минусы MJX C4008Так как камера заявлена для установки на небольшие квадрокоптеры с коллекторными двигателями, то не будем ее сравнивать с дальнобойными FPV на 5.8, 1.2 и 900 мегагрцовыми передатчиками. Сами квадрокоптеры относятся к классу «летающая игрушка» и имеют небольшой размер и дальше 30 метров управлять ими весьма проблематично, да и пульты управления обычно рассчитаны на 50 метров полета. К плюсам относится цена — камера для FPV полетов в корпусе не «выцветающая» при попадании солнца в кадр стоит столько же, C4008 при этом еще и передает картинку. Минусы. По большей части минусы — это придирки 🙂 Но, ведь всегда хочется чего то большего, за весьма маленькие деньги! Name already in usewiki / ru / fpv.md
Copy raw contents Copy raw contents Использование OpenIPC как бюджетного видеолинка для FPV систем Создание доступного радио-линка для передачи видео между радиоуправляемой моделью и оператором всегда занимало умы изобретателей. В 2015 году немецкий энтузиаст Befi выдвинул идею OpenSource дрона, где предложил использовать обычные WiFi адаптеры, число которых во всем мире уже достигло несколько миллиардов штук, а цена снизилась насколько, что они стали самыми доступными видами цифровых приемо-передатчиков. Ключевой идей были не сами WiFi адаптеры, а нетрадиционный метод их использования: отказ от установки сетевого соединения и перевод в широковещательный режим, когда один адаптер выполняет функцию передатчика цифрового сигнала, в второй — является приемником. Было предложено взять бюджетный SBC Raspberry Pi, подключить к нему камеру по MIPI интерфейсу и USB WiFi донгл с числа рекомендуемых, а с другой стороны на приемнике — аналогичный WiFi модуль с HDMI монитором. При этом вместо традиционного для передачи видео с низкой задержкой протокола UDP был использован протокол более низкого уровня для гибкого управления данными: управлением шириной полосы, мощностью передатчика и возможностью восстановления данных, если пакет при отправке был частично поврежден. Одной из технических проблем являтся то, что не каждый WiFi адаптер способен работать в таком низкоуровневом режиме, более того: практически всегда приходится устанавливать специальные драйверы, которые существуют только под Linux. Приемник в этом режиме работает в так называемом monitor mode , когда он принимает и передает операционной системе каждый пакет заданного WiFi канала, где затем решается что с ним делать дальше: декодировать или отбросить. WiFi адаптер передатчика должен работать в injection mode , когда ядро операционной системы фактически не участвует в формировании сетевых пакетов, предписанной сетевой моделью ISO. Часть адаптеров поддерживает оба режима, некоторые из них — только какой-то один, поэтому могут стоять только на стороне передатчика или приемника.
Проект был назван Wifibroadcast, его идеи получили дальнейшее развитие в проекте EZ-WifiBroadcast, после чего новая команда разработчиков переписала исходный код с нуля в самом популярном на сегодняшний день проекте OpenHD. Кроме того в процессе эволюции появились независимые проекты WFB-ng и Ruby (последний с закрытым исходным кодом). Революция от OpenIPC Классический сетап в проекте OpenHD (и других похожих проектов) состоит из MIPI- или USB- камеры, подключенной к Raspberry Pi и Jetson Nano, которые выступают видеоэнкодером и роутером воздушной системы и в свою очередь соединены с WiFi адаптером по USB и с полетным контроллером по UART. Наземная станция обычно состоит из такого же WiFi адаптера, роутера и высококонтрастного монитора или очков. Иногда MIPI- или USB- камера меняется на IP-камеру, которая и мощнее (имеет свой собственный аппаратный энкодер) и стоит дешевле при аналогичных характеристиках. Большинство современных видеокамер являются типовыми embedded устройствами с Linux на борту (но значительно скромнее в размерах RAM и флеш памяти по сравнению с Raspberry и Jetson), что позволяет перекомпилировать и запускать на них практически любое переносимое ПО. В процессе работы с данной технологией возникла идея об упрощении полетной системы и переноса всего необходимого ПО непосредственно на IP-камеру. Технически FPV прошивка проекта OpenIPC представляет собой специальную сборку с двумя типами драйверов популярных WiFi адаптеров, стримера Majestic (который выполняет роль GStreamer в классической схеме на системе-передатчике) и WFB-ng.
IP-камера. Учитывая популярность среди FPV сообщества модели VEYE 307, мы рекомендуем приобрести плату IVG-G2S IP камеры производства компании XiongMai с точно таким же сенсором IMX307, но по более приятной цене (или еще более приятной, если есть возможность покупки на Taobao, например, через посредника). При заказе платы укажите, фокусное расстояние объектива, который установит продавец под ваш заказ (больше фокусное расстояние — больше увеличение, но меньше угол обзора). В дальнейшем объектив можно поменять на другой с такой же резьбой, либо сразу купить несколько моделей на выбор (стандартом в мире видеонаблюдения считается 3.6мм). Плата IP-камеры питается от 12V (фактически достаточно 5V, если не использовать ее как видеокамеру вместе с подсветкой) и для начальных тестов желательно взять сразу совмещенный кабель питание-Ethernet, который бывает двух типов: 12V с подключением блока питания через джек и активный PoE 48V (выбирайте в зависимости от возможностей вашего сетевого коммутатора). WiFi адаптер. В настоящий момент FPV прошивка поддерживает два типа драйверов для чипов RT8812au и AR9271 (но в принципе никто не мешает добавить другие адаптеры). Крайне рекомендуется с обоих сторон линка использовать одинаковые адаптеры (более того, брать их из одной партии парами) и использовать только 5GHz частоты с связи с полной перегрузкой 2.4GHz. Прошивка протестирована с двумя адаптерами на RT8812au и AR9271 (чип работает только с 2.4GHz). UART-USB адаптер на 3.3V. Обратите внимание, что использование 5V адаптера может сжечь вашу камеру. Не покупайте/не используйте адаптеры на базе PL2303, хотя и стоят они дешевле, они не будут работать с данным SoC. Указанный в предыдущем пункте программатор умеет работать UART адаптером, поэтому если он есть, то отдельный можно не покупать. Коннекторы с разъемами типа JST 1.25 в конфигурации 3 Pin и 8 Pin для подключения к UART порту камеры и замены штатного кабеля питания-Ethernet в полетном варианте. Микросхема SPI NOR флеш памяти от 16 мегабайт и выше на замену стандартной 8 мегабайтовой. Рекомендуем W25Q128FVIQ или любую другую совместимую с прошивкой (новые модули также могут быть добавлены в проект по ID микросхемы). Обратите внимание, что на рынке представлено очень много подделок под Winbond и необходимо тщательно выбирать продавца. Программатор SPI NOR для флеш памяти. В принципе можно обойтись без него средствами проекта burn, который позволяет заливать систему в пустой/убитый флеш (см. раздел Заливка образа на пустую флеш с помощью burn). Обратите внимание, что хотя у многих программаторов есть в комплекте «прищепка», снимать дамп/программировать флеш память напрямую на плате категорически нельзя, из-за того, что программатор кроме микросхемы будет питать также всю остальную плату (есть вариант подрезать VCC ногу). Радиаторы на SoC приветствуются (как обычно не установлены производителем из-за удешевления). Светосильный объектив F0.95 (другие варианты раз и два) для полного раскрытия возможностей сенсора Sony IMX307 и приятных полетов ночью. Зум объектив 2.8-12мм. Обратите внимание, что в комплекте идет устаревшая плата IP камеры на базе HiSilicon 3516EV100, которую также можно перепрошить на OpenIPC. Так как плата, управляющая моторами, общается с основной платой через UART, то придется творчески решить вопрос с мультиплексированием двух UART портов или выводом нераспаянных контактов. FPC разъем на 16 pin для более качественной пайки подключения к USB адаптеру и соответствующий кабель. Имеется два варианта использования прошивки OpenIPC на рассматриваемой плате: с заменой флеш памяти на более емкую (для установки собственных программ) и без замены (это проще, но в таком случае дальнейшие возможности расширения новой системы будут сильно ограничены). Далее рассматриваются по шагам оба этих варианта: Установка на камеру (общее начало)
Установка на камеру (вариант без пайки флеш)
Установка на камеру (вариант с заменой флеш)
Установка на камеру (общее окончание)
Проверка работы наземной станции (на десктопе)
Развитие наземной станции, телеметрия Предполагается, что на машине под Linux установлен wfb-ng по инструкции с quick-start-using-ubuntu. В последующих примерах используется Хubuntu 18.04 LTS и wfb-ng 22.09.
Если значение recv остается нулем, а значение lost растет — скорее всего, не совпадают ключи камеры и наземной станции. Убедитесь, что /etc/gs.key скопирован на наземную станцию. Если никаких пакетов нет — убедитесь, что channel=xx в /etc/wfb.conf на камере и wifi_channel=xx в /etc/wifibroadcast.cfg на земле имеют одинаковые значения. Для диапазона 5.8 ГГц адаптера RTL8812AU рекомендуется использовать каналы 60 и выше.
В случае двусторонней телеметрии QGC должен загрузить параметры, позволять их менять, позволять переключать полетные режимы, загружать и выгружать миссии:
Видно, что QGS также уже отображает видео. Задержка в 4.0.11 довольно значительна из-за чисто программной обработки потока, разумно пробовать современные версии под Ubuntu 20.04 и новее.
Заливка образа на пустую флеш с помощью burn (если нет программатора) Запускаем burn при выключенной плате: включаем питание платы и ждем заливки U-Boot и появления командной строки. Далее выполяем следующие команды, где 192.168.0.8 — адрес TFTP сервера и 192.168.0.200 — временный адрес IP камеры. Учитывая, что по тексту выше мы дорабатывали плату от обычной бюджетной камеры видеонаблюдения и монтаж USB коннектора производился без заводских разъемов, напрашивается вариант сделать дополнительную специальную плату (похожую на плату со встроенным WiFi адаптером), на которой будут выведены разъемы для USB (возможно с дополнительным хабом) и SD карты. Это позволит передавать видео в эфир с минимальной задержкой в 720p, одновременно записывая оригинал в 1080p для последующей публикации на YouTube). Если у вас есть возможность разработать такую плату и поделиться схемой с сообществом, мы будем очень признательны. Сколько потребляет камера во время своей работы? Потребление зависит от того, включен ли сенсор (который сам по себе является одним из больших потребителей) и по нашим замерам составляет 1.7W в активном режиме и y 1.1W при выключенном сенсоре (но работающей основной системе). Отсюда можно сделать вывод, что при необходимости можно программно выключать/включать стример, чтобы еще больше уменьшить потребление системы, в те моменты когда это необходимо. Дополнительно стоит рассмотреть:
Поддерживается ли WDR? Для полноценной работы WDR на IP камерах как основной чип так и сенсор оба должны поддерживать одинаковый стандарт WDR (их существует несколько типов). При этом обычно сенсор начинает работать на двойной частоте (например, 60FPS вместо 30FPS), делая один кадр с длинной выдержкой, второй — с короткой. Далее ISP (Image Signal Processor) аппаратно производит склейку из двух кадров одного, взяв темные участки с кадра с длинной выдержкой и светлые — с короткой, формируя изображение с расширенным цветовым диапазоном. К сожалению, для получения WDR изображения вся система должна работать как минимум в два раза быстрее (или говоря по-другому иметь больше транзисторов, делая в два раза больше работы в момент времени), поэтому в процессоре Goke V200 этого режима нет. Если вам принципиальна поддержка WDR, рассмотрите возможность использования следующей в линейке процессоров V300, который также поддерживается проектом. Можно ли вместо WiFi использовать LTE адаптер? Можно, но потребуется модификация прошивки. Рекомендуем вопрос по адаптации конкректного оборудования задавать в официальной группе. Можно ли подключить SD карту для записи видео? Можно. Фотография от подписчика:
Таблица распиновки вспомогательного разъема:
Какую дополнительную периферию еще можно подключить? Исходя из распиновки нераспаянного FC разъема, показанного выше, видно, что он используется для дополнительных плат расширения с WiFi (по USB) и SD картой. Неиспользуемые пины можно переназначить следующим образом:
D/N (day/night) можно использовать только как входящий GPIO15 (из-за установленного транзистора). Слева от него на том же разъеме находится GND и GPIO16 (который можно использовать как GPIO в двухстороннем режиме или PWM порт). На разъеме питание-сеть имеются два GPIO (ETH_STA — GPIO14, ETH_ACT — GPIO12), которые обычно используются для отображения активного физического подключения Ethernet и активности при передачи данных. Их также можно использовать для обычные двусторонние GPIO, причем GPIO12 возможно перевести в режим UART2_RXD и реализовать дополнительный одностронний UART порт (только на прием данных). На этой плате на данных контактах установлены резисторы 330Ом, но это не должно повлиять на работу UART. Учитывая, что корпус SoC выполнен в формате QFN88, имеется возможность припаяться тонким проводом практически к любой ножке микросхемы и задействовать дополнительные порты. Распиновка чипа и фотография реальной платы без чипа представлены ниже:
Обратите внимание, что такое решение далеко от промышленного (в идеале нужно изготовить собственную плату) и если его не избежать, рекомендуется спиливание корпуса чипа для более надежного контакта. Можно ли использовать другую IP камеру? Если у вас есть скиллы продвинутого пользователя Linux, то вы можете присоединиться к нашему проекту и адаптировать FPV прошивку под любой процессор, поддерживаемый OpenIPC. В большинстве случаев навыки программирования не требуются (либо вы получите их естественным путем в процессе знакомства и изучения системы). Как еще больше можно уменьшить задержку передачи видео? Чтобы получить минимально возможную задержку, в нашей прошивке используется режим низкой задержки (low latency), который имеется в процессорах HiSilicon/Goke. При этом конкретные значения зависят от модели SoC, сенсора, его разрешения, текущая выдержка кадра и даже нагрев чипа в процессе работы. Основную лепту в задержку вносит FPS системы (60FPS без всякого тюнинга будет лучше 30FPS с максимально выкрученными настройками), поэтому если вам важна низкая задержка обратите внимание на более дорогое железо. Для получения еще меньшей задержки возможно отключения промежуточных блоков за счет ухудшения качества картинки либо перехода на более современные чипсеты. У нашей команды есть большой опыт передачи медиаинформации с низкой задержкой (на ряде проектов были достигнуты цифры задержки в 45ms). Если вас интересуют коммерческие услуги (консалтинг, разработка аппаратного и программного обеспечения, реверс-инжиниринг) свяжитесь с нами. FPV WIFI камера для Syma X5SW, или как X5C превратить в X5SW
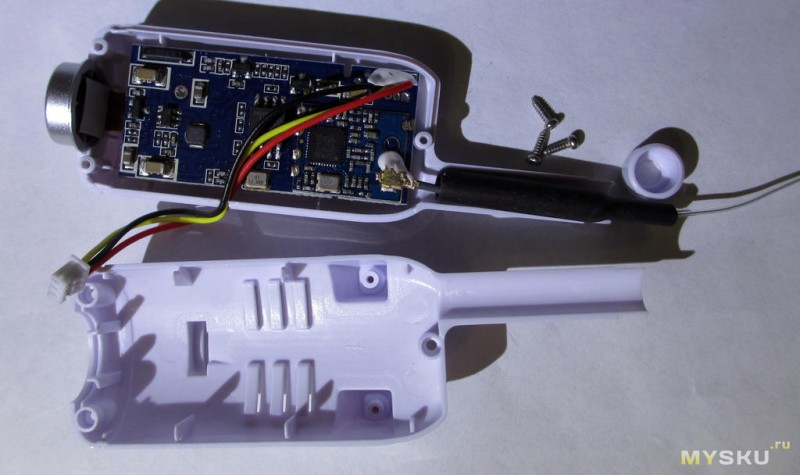
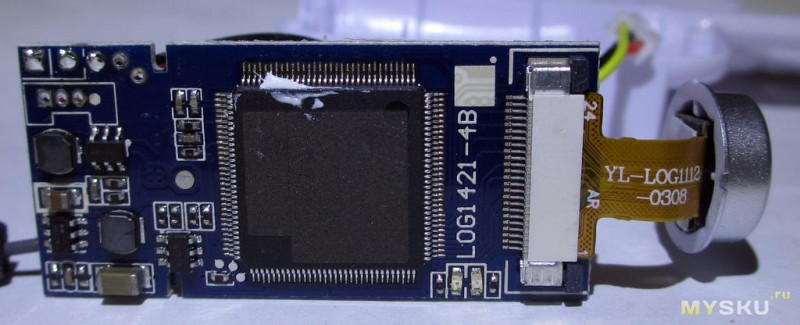
FPV WIFI камера, устанавливается на X5C, разрешением 640×480/MJPEG. В комплект входит сама камера и прищепка для крепления смартфона к пульту. Никаких инструкций итп нету. Существует вариант комплектации без прищепки, он заметно дешевле,. В прищепку умещается и нормально держится samsung mega6,3 с книжкой-обложкой, есть еще запас миллиметров в 5, так что можно надеятся на любые смартфоны вплоть до 6,5", а вот с 7" планшетами уже не получится. Надевается она на штырь антенны, и тут есть некоторые проблемы — фиксации нет, кольцо вращается вокруг нее. Пришлось приклеить. Камера имеет крепления аналогичные штатной, пишущей на карту, камере от X5C, но при этом направлена чуть ближе к горизонтали. Обьективчик обеих камер: Внутренности: До кучи комплектной: Работает обычным образом — организует wifi точку доступа, к которой цепляется смартфон и с помощью программы под интуитивно понятным названием syma fpv показывает и записывает передаваемый поток. На mega63 проблем не возникло, а вот на другом смарте с андроидом v2.3 работать не захотела. Встроенной карты памяти и соответственно прямой записи на нее не предусмотрено, только запись переданного на смартфон видео или снимков. 2-3mbsp. 15fps. Потребление незначительно зависит от напряжения на аккумуляторе. Будучи включенной во время передачи видео: После включения горит зеленый индикатор, потом загорается красный, потом красный начинает мигать — камера готова к работе, к ее точке доступа можно подключатся. На это уходит 30-35s. Задержка передачи видео в идеальных условиях 0,7s: Стоп-кадр: Работать каналу управления вроде бы не мешала. Надежды на возможность использования камеры для поиска квадрика не очень оправдались — в случае приземления из-за разряда аккумулятора камера быстро высаживает его до отключения, потребление у нее слегка выше штатной, записывающей на карту. Выводы: С камерой в облака. Часть 1
Многие из нас размышляли об установке камеры на летательный аппарат. Вот я и прошел этот путь. Углубившись в тонкости видеополетов от первого лица (FPV), делюсь полученными знаниями с теми, кто тоже хочет испытать новые ощущения. Пост состоит из 2 частей. В первой — ответы на основные вопросы. Их легко найти в интернете по-отдельности, но сложно вместе: дальность полета (чем ограничивается и какая максимальная), качество картинки, грузоподъемность, стоимость и сроки (от выделения бюджета до первого полета). Вторая часть (сейчас в процессе) — о сборе конкретной системы со всеми тонкостями, какие мне только удалось найти и испробовать. Что именно и где купить, как расположить на модели, зачем и что экранировать, где требуются ферритовые кольца, а где виброгасители. Ну что же, перейдем сразу к делу.
Как оказалось, дальность управляемого полета с трансляцией видеосигнала может достигать десятков километров для планеров (ниже видео полета на 80 км. для терпеливых) и 3-7 км для вертолетов и мультикоптеров (быстрее расходуется батарея). То есть даже на небольшом коптере можно запросто улететь в облака (красивое видео для всех). И все же надо представлять реальные ограничения:
Очевидно, что для максимально продолжительного полета нужна оптимальная батарея. По этой теме нашел одну интересную статью. Здесь утверждается, что вес батареи должен составлять 87% от веса модели без батареи. Это позволяет реализовать 83% всего потенциала полетного времени модели, используя лишь 61% от максимального ее веса.
Летать можно 2-мя способами. С помощью монитора или в очках.
У меня сейчас мониторчик около 5 дюймов, закрепленный прямо на пульте. Для тестовых полетов этого хватает. Реальное погружение достигается с помощью видеоочков, так что их характеристики важнее, тем более что выбор монитора зависит скорее от фантазии пилота. Если не брать hi-end, то современный рабочий вариант очков имеет разрешение 800×600, чего более чем достаточно. Конкретные модели очков разберем во 2 части. С камерами сложнее. После некоторых исследований (описание во второй части) и выслушивания потоков противоречивой информации (одни будут уверять вас, что нужна отдельная курсовая камера, другие, что это не так), я все же понял, что для полетов нужна отдельная курсовая аналоговая камера. Такие продаются с CMOS, CCD и PIXIM-матрицами. Внутри типов различаются по количеству линий телевизионной развертки (TVL). Видел в продаже от 490 до 700. По габаритам есть отличия в платах (32×32 мм. — наиболее подходящие, 38×38 и 42×42). В итоге мой выбор пал на лучшую, на мой взгляд, камеру с PIXIM-матрицей. Разрешение 690 на 460 (690 HTVL, 490 VTVL). Настраивает экспозицию для каждого пикселя отдельно (что-то наподобие HDR в фотографии, только для видео), так что и солнце видно, и траву в этот момент можно различить. В темноте сама переключается в ночной режим. Спокойно переносит любые вибрации, никаких эффектов типа “Желе” не обнаружено.
Правда, на уровне ощущений, даже на отличной камере детализация низковата. Атмосферу не чувствуешь, и какие-то шумы присутствуют. То есть функционально камера отрабатывает на 100%, а эмоционально — это, конечно, не кино. Насладиться красотой пейзажей можно потом, в записи со второй цифровой HD-камеры, а не в процессе полета. Кстати, помех оказалось меньше, чем ожидал. Иногда что-то может промелькнуть, но в зоне уверенного приема все более чем стабильно. Видео ниже наглядно показывает характер помех и их, я бы сказал, максимальную частоту. Конечно, блики на экране позволяют получить информацию только о помехах, а не о качестве картинки, но ничего лучше не нашел — уж слишком остальные ролики, без бликов, разбавлены однотипными и продолжительными вступлениями.
Этот вопрос волнует многих начинающих, но совершенно не волнует посвященных. Любая устойчивая модель сама весит от 1 кг и может спокойно поднять в воздух все, что необходимо в полете. Для перевозки тяжелых грузов, обычно, модели не собирают, так как затея того просто не стоит. Для любой профессиональной задачи давно придуман какой-то более рациональный вариант. Вот видео, где мультикоптер с лучами всего по 35 см. поднимает более 20 кг (подъем на 3 минуте). Существуют специальные калькуляторы, позволяющие рассчитать модель под нужные параметры. Например, вот этот. Здесь нюансы его использования.
Любая модель потребует приемника и передатчика радиоуправления (RX/TX), и приемника и передатчика видео (vRX/vTX). Комплекты радиоуправления можно рассматривать от 10 тысяч, где-то. Видеосистема от 5. Добавим бюджетную камеру и дешевый монитор, это еще 5. В итоге от 20000 рублей — аппаратура, плюс сама модель и все что к ней от 10. Как я ни пытался разумно экономить — квадрокоптер для FPV вышел под 70 тысяч, увы. С другой стороны, коптер — это не смартфон. Меня заверили, что собранная модель не дешевеет. Всегда можно продать. Но лучше все же мысленно прощаться с тем, что ты на километры запускаешь в воздух. Как понял, самое дешевое — это собрать планер (от 8000 руб.). Самое дорогое – октокоптер с подвесом под зеркальную камеру (под 250000 все в сборе). Во второй части, при разборе конкретного оборудования, приведу стоимость комплектующих и расскажу, почему и что может быть лучше купить.
Конечно, самый простой вариант — купить готовую модель. При этом вы заплатите наценку на каждую деталь отдельно, плюс за сборку от 5 до 25 тыс. в среднем, и прождете ее неделю-две. Может, вам повезет, и вы купите модель после кого-то без наценок и сразу. Правда, не факт, что это будет именно то, что вам нужно. Я же решил подойти к вопросу более осознанно и сконфигурировать все по-отдельности, но покупая у нас в магазинах для экономии времени в ущерб экономии денег. Вышло около недели или двух вместе с отладкой. Если заказывать все из Китая-Тайваня-Америки, то прибавляем еще недели 3 на доставку, но выйдет дешевле процентов на 20-30. Также скажу, что Москве еще есть комплектующие, а в Питере, например, все уже сложнее. Приходится ориентироваться на наличие, а не на желания, и ездить в весьма удаленные районы. В других регионах не знаю, но думаю — интернет остается единственным разумным вариантом. Прибавьте ко времени еще и полеты на тренировочном микроклассе или симуляторе. Еще неделю, может. Итак, первая часть подходит к концу. Если вы не остыли и желаете дальнейшего погружения в мир FPV, предлагаю вашему вниманию вторую часть, в которой будут освещены следующие вопросы:
Надеюсь, было интересно. Ссылка на вторую часть ниже. Вот еще одно видео на прощание) |